chargetchar(void){while(USART_GetFlagStatus(USART6,USART_FLAG_RXNE)==RESET);returnUSART6->DR&0xff;}voidputchar(charc){/* Wait until data was tranferred */while(USART_GetFlagStatus(USART6,USART_FLAG_TXE)==RESET);USART6->DR=(c&0xff);}
#if defined (HSE_VALUE)/* Redefine the HSE value; it's equal to 8 MHz on the STM32F4-DISCOVERY Kit */#undef HSE_VALUE#define HSE_VALUE ((uint32_t)8000000) #endif /* HSE_VALUE */
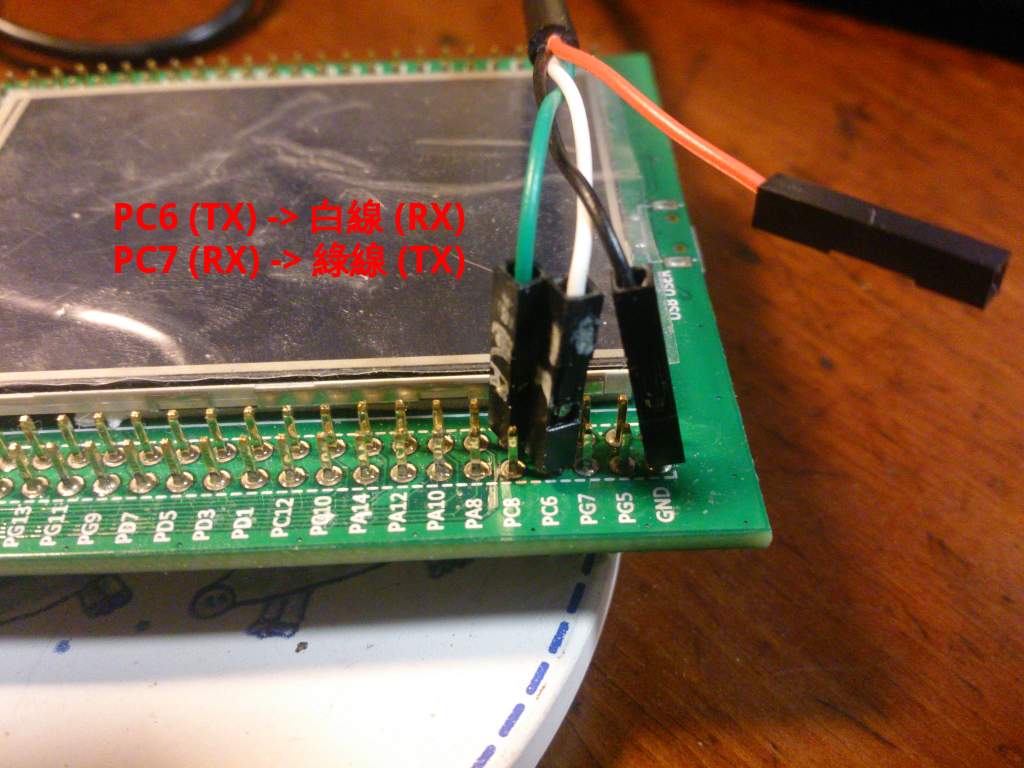
#include "stm32f4xx_conf.h"#include <stm32f4xx.h>#include <stm32f4xx_gpio.h>#include <stm32f4xx_usart.h>voidsetupUSART(void);/* helper functions */voidprint(char*str);chargetchar(void);voidputchar(charc);intmain(intargc,char**argv){/* Setup USART */setupUSART();/* Greeting */print("Hello World\n");print("\r> ");while(1){/* Echo a character */charc=getchar();putchar(c);/* Show prompt with enter */if(c=='\n'){print("\r> ");}}return0;}voidsetupUSART(void){GPIO_InitTypeDefGPIO_InitStructure;/* Enable GPIOC clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE);/* Connect USART6_Tx instead of PC6 */GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_USART6);/* Connect USART6_Rx instead of PC7 */GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_USART6);/* Configure USART Tx (PC6) and Rx (PC7) as alternate function */GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;GPIO_Init(GPIOC,&GPIO_InitStructure);/******************************************** * USART set started here ********************************************/USART_InitTypeDefUSART_InitStruct;/* Enable USART6 clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6,ENABLE);/* 115200, N81 */USART_InitStruct.USART_BaudRate=115200;USART_InitStruct.USART_WordLength=USART_WordLength_8b;USART_InitStruct.USART_StopBits=USART_StopBits_1;USART_InitStruct.USART_Parity=USART_Parity_No;USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;USART_InitStruct.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;/* Apply USART settings */USART_Init(USART6,&USART_InitStruct);/* Enable USART */USART_Cmd(USART6,ENABLE);}chargetchar(void){while(USART_GetFlagStatus(USART6,USART_FLAG_RXNE)==RESET);returnUSART6->DR&0xff;}voidputchar(charc){/* Wait until data was tranferred */while(USART_GetFlagStatus(USART6,USART_FLAG_TXE)==RESET);USART6->DR=(c&0xff);}voidprint(char*str){assert_param(str!=0);while(*str){putchar(*str);str++;}}/* Trap here for gdb if asserted */voidassert_failed(uint8_t*file,uint32_tline){while(1);}